|
C/C++ API Reference
|
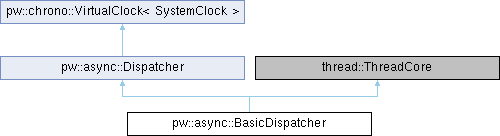
BasicDispatcher is a generic implementation of Dispatcher.
Public Member Functions | |
| void | RunUntilIdle () |
| Execute all runnable tasks and return without waiting. | |
| void | RunUntil (chrono::SystemClock::time_point end_time) |
| void | RunFor (chrono::SystemClock::duration duration) |
| void | RequestStop () |
| void | Run () override |
| void | PostAt (Task &task, chrono::SystemClock::time_point time) override |
| bool | Cancel (Task &task) override |
| chrono::SystemClock::time_point | now () override |
| Returns the current time. | |
 Public Member Functions inherited from pw::async::Dispatcher Public Member Functions inherited from pw::async::Dispatcher | |
| virtual void | Post (Task &task) |
| virtual void | PostAfter (Task &task, chrono::SystemClock::duration delay) |
| virtual void | PostAt (Task &task, chrono::SystemClock::time_point time)=0 |
| virtual bool | Cancel (Task &task)=0 |
| virtual SystemClock::time_point | now ()=0 |
| Returns the current time. | |
Protected Member Functions | |
| virtual void | ExecuteTask (backend::NativeTask &task, Status status) |
Additional Inherited Members | |
| Static Public Member Functions inherited from pw::chrono::VirtualClock< SystemClock > | |
| static VirtualClock< SystemClock > & | RealClock () |
| Returns a reference to the real system clock to aid instantiation. | |
