|
C/C++ API Reference
|
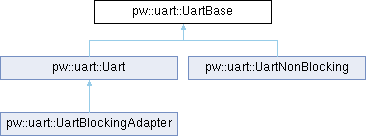
The common abstract base class of the UART interface.
The UartBase interface provides basic method for enabling and configuring a UART. Methods for actually communicating via the UART are on the Uart and UartNonBlocking child classes.
Public Member Functions | |
| Status | Enable () |
| Status | Disable () |
| Status | SetBaudRate (uint32_t baud_rate) |
| Status | SetFlowControl (bool enable) |
| size_t | ConservativeReadAvailable () |
| Status | ClearPendingReceiveBytes () |
